An Optimal Data Fusion Approach for Precise Position Estimation of Smartphone User
An Optimal Data Fusion Approach for Precise Position Estimation of Smartphone User
Keywords:
Data Fusion, BLE, PDR, Indoor Positioning, artificial intelligence, ANN, Particle FilterAbstract
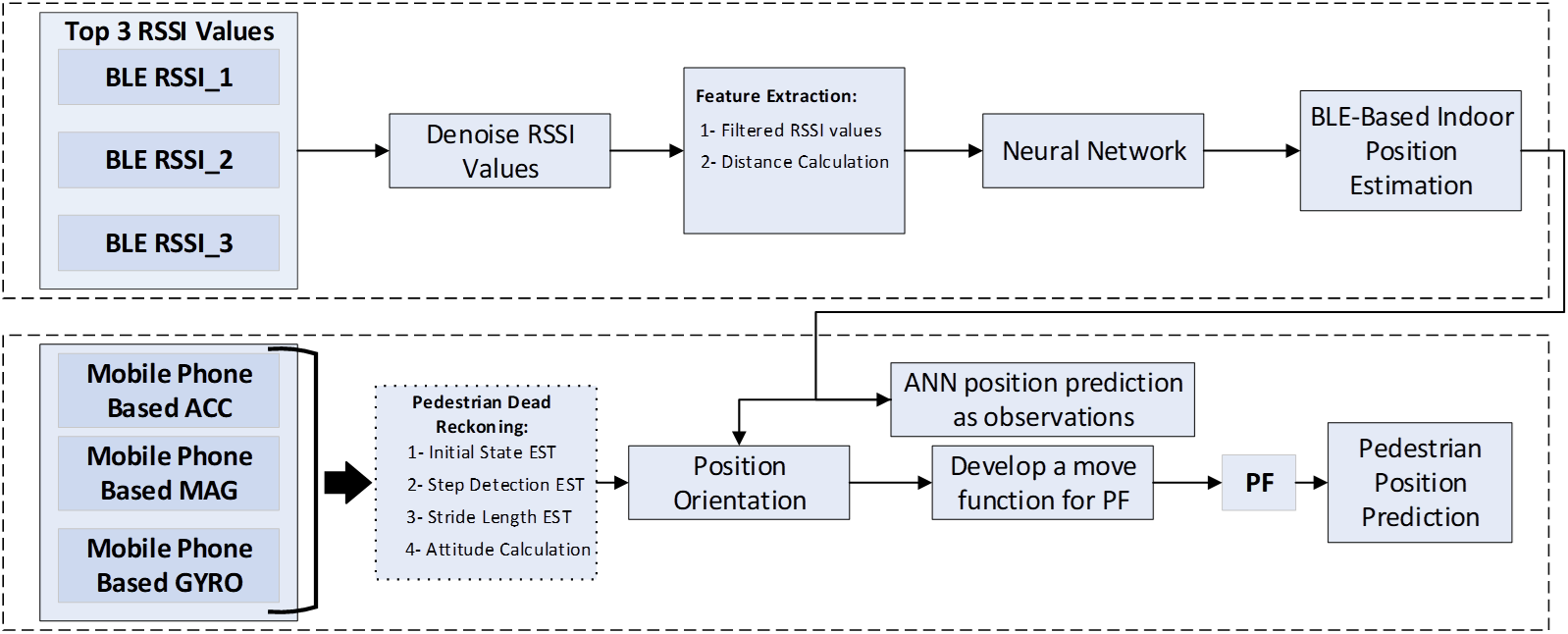
This paper proposes an optimal data fusion approach for precise position estimation of smartphone users in challenging environments, combining BLE-based indoor position estimation and PDR using smartphone sensors. The approach utilizes RSSI values from nearby BLE beacons for BLE-based estimations and employs PDR with an accelerometer, magnetometer, and gyrometer for position orientation. These observations are then fed into an ANN for accurate position prediction, and Particle Filter is used for probabilistic pedestrian position prediction. Experimental results demonstrate improved accuracy compared to individual techniques, making the approach robust for accurate smartphone user positioning in challenging environments.
References
Jamil, H.; Qayyum, F.; Jamil, F.; Kim, D.-H. Enhanced PDR-BLE Compensation Mechanism Based on HMM and AWCLA for Improving Indoor Localization. Sensors 2021, 21, 6972. https://doi.org/10.3390/s21216972
H. Jamil, F. Qayyum, N. Iqbal, F. Jamil and D. H. Kim, "Optimal Ensemble Scheme for Human Activity Recognition and Floor Detection Based on AutoML and Weighted Soft Voting Using Smartphone Sensors," in IEEE Sensors Journal, vol. 23, no. 3, pp. 2878-2890, 1 Feb.1, 2023, doi: 10.1109/JSEN.2022.3228120.
Jamil, F.; Iqbal, N.; Ahmad, S.; Kim, D.-H. Toward Accurate Position Estimation Using Learning to Prediction Algorithm in Indoor Navigation. Sensors 2020, 20, 4410. https://doi.org/10.3390/s20164410
Jamil, F.; Kim, D.H. Improving Accuracy of the Alpha–Beta Filter Algorithm Using an ANN-Based Learning Mechanism in Indoor Navigation System. Sensors 2019, 19, 3946. https://doi.org/10.3390/s19183946
Jamil, H., Ali, K.M. & Kim, DH. Federated recognition mechanism based on enhanced temporal-spatial learning using mobile edge sensors for firefighters. fire ecol 19, 44 (2023). https://doi.org/10.1186/s42408-023-00203-5
Jamil, Faisal and Kim, DoHyeun. ‘Enhanced Kalman Filter Algorithm Using Fuzzy Inference for Improving Position Estimation in Indoor Navigation’. 1 Jan. 2021 : 8991 – 9005.
Corbacho Salas, A. (2014). Indoor positioning system based on bluetooth low energy (Bachelor's thesis, Universitat Politècnica de Catalunya).
Kriz, P., Maly, F., & Kozel, T. (2016). Improving indoor localization using bluetooth low energy beacons. Mobile information systems, 2016.
Zhang, M., Wen, Y., Chen, J., Yang, X., Gao, R., & Zhao, H. (2018). Pedestrian dead-reckoning indoor localization based on OS-ELM. IEEE Access, 6, 6116-6129.
Wang, Y., & Zhao, H. (2018). Improved smartphone-based indoor pedestrian dead reckoning assisted by visible light positioning. IEEE Sensors Journal, 19(8), 2902-2908.
You, Y., & Wu, C. (2021). Hybrid indoor positioning system for pedestrians with swinging arms based on smartphone IMU and RSSI of BLE. IEEE Transactions on Instrumentation and Measurement, 70, 1-15.
Zhao, H., Cheng, W., Yang, N., Qiu, S., Wang, Z., & Wang, J. (2019). Smartphone-based 3D indoor pedestrian positioning through multi-modal data fusion. Sensors, 19(20), 4554.
Zhang, E., Masoud, N., Bandegi, M., Lull, J., & Malhan, R. K. (2022). Step attention: Sequential pedestrian trajectory prediction. IEEE Sensors Journal, 22(8), 8071-8083.
Song, X., Fan, X., Xiang, C., Ye, Q., Liu, L., Wang, Z., ... & Fang, G. (2019). A novel convolutional neural network based indoor localization framework with WiFi fingerprinting. IEEE Access, 7, 110698-110709.
Kriz, P., Maly, F., & Kozel, T. (2016). Improving indoor localization using bluetooth low energy beacons. Mobile information systems, 2016.
Tian, Q., Kevin, I., Wang, K., & Salcic, Z. (2019). A resetting approach for INS and UWB sensor fusion using particle filter for pedestrian tracking. IEEE Transactions on Instrumentation and Measurement, 69(8), 5914-5921.
Downloads
Additional Files
Published
How to Cite
Issue
Section
Categories
License
Copyright (c) 2023 Journal of Intelligent Pervasive and Soft Computing

This work is licensed under a Creative Commons Attribution 4.0 International License.
Articles are licensed under an open access Creative Commons CC BY 4.0 license, meaning that anyone may download and read the paper for free.